


斯坦福大学开源的toddlerbot:一款用于运动操作的人形机器人平台
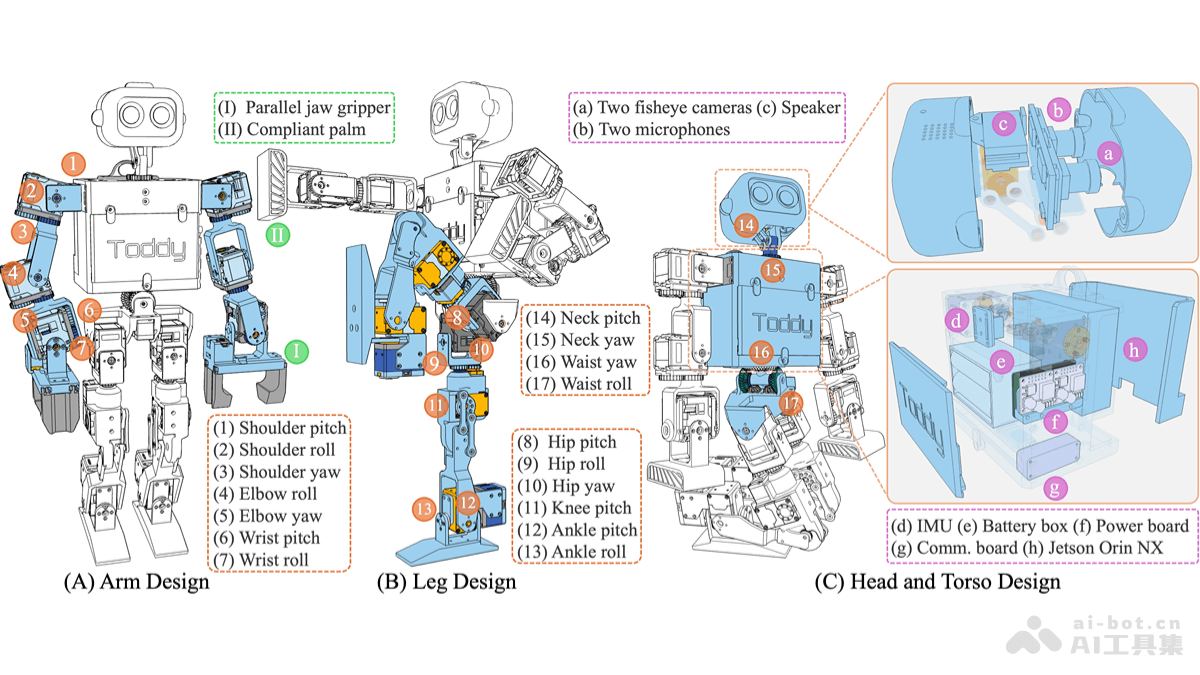
ToddlerBot是斯坦福大学推出的一款开源人形机器人平台,专为高效收集大规模、高质量的运动操作训练数据而设计。它拥有30个主动自由度,采用Dynamixel电机驱动,总成本控制在6000美元以内。凭借数字孪生技术和零点校准,ToddlerBot实现了模拟到现实的零样本迁移,并支持远程操作和高效的现实世界数据采集。在臂展、负载能力、耐力和动态运动等方面,ToddlerBot均展现出优异性能。其开源设计和详细的组装手册方便复制和维护,非常适合科研和教育应用。
 ToddlerBot的核心功能:
ToddlerBot的核心功能:
高效数据采集: 在模拟和真实环境中同步采集高质量训练数据,满足大规模机器学习需求。全身运动与操作: 30个自由度赋予其执行复杂全身运动和操作的能力,例如行走、俯卧撑、引体向上、双臂操作以及全身协调操作。零样本模拟到现实迁移: 基于高精度数字孪生技术和电机系统辨识,实现模拟策略到真实世界的无缝转移。远程操作与数据采集: 配备直观的远程操控设备,方便基于人类演示快速采集真实世界数据,用于学习运动技能。人机交互与协作: 支持多机器人协作任务,例如共同完成房间清洁等复杂场景。
ToddlerBot的技术原理详解:
数字孪生与零点校准: 高保真数字孪生模型基于精确的物理模型和系统辨识技术构建,确保模拟数据与真实世界的一致性;3D打印的校准设备则快速校准机器人零点位置,保证运动控制精度。电机系统辨识 (SysID): 通过电机跟踪扫频信号,采集位置跟踪数据并拟合执行模型,确保动态参数的准确性,从而使机器人在模拟和真实环境中保持一致的运动特性。远程操作技术: 以第二个上肢作为远程操作设备,结合力敏电阻和手持游戏电脑(如Steam Deck或ROG Ally X),实现对机器人运动的直观控制,方便操作员引导机器人完成复杂任务。强化学习与模仿学习: 采用MuJoCo和PPO算法进行强化学习,训练步行和转向策略,输出关节位置设定值,实现高效的运动控制;模仿学习则基于远程操作采集的真实世界数据,训练扩散策略(Diffusion Policy),以完成复杂的操作任务。
项目资源:
项目官网: https://www.php.cn/link/813b02a0d7aae51c1a84fca601b52cadGitHub仓库: https://www.php.cn/link/813b02a0d7aae51c1a84fca601b52cadarXiv技术论文: https://www.php.cn/link/813b02a0d7aae51c1a84fca601b52cad
ToddlerBot的应用前景:
家庭玩具整理: 两个机器人协作,一个负责拾取玩具,另一个负责推车,共同完成玩具收纳。教育编程平台: 学生可以通过编程让机器人完成行走、俯卧撑等任务。实验室运动技能研究: 利用强化学习训练机器人完成跳跃、攀爬等高难度动作。家庭陪伴机器人: 与儿童互动,进行拼图或运动游戏。工业零部件操作: 操作小型电子元件或机械零件。
以上就是ToddlerBot— 斯坦福大学开源的机器学习与人形机器人平台的详细内容,更多请关注【创想鸟】其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至253000106@qq.com举报,一经查实,本站将立刻删除。
发布者:PHP中文网,转转请注明出处:https://www.chuangxiangniao.com/p/3048650.html